
Composition de l’automate
Projet d’automatique
:
Maquette de simulation de traitement de surface
Présentation - La maquette - Le logiciel Cadepa - L’automate TSX 47
|
Ce projet d’étude réalisé avec deux autres élèves de l’IUT occupait toute la deuxième année d’IUT à raison de 4 heures par semaines en moyenne. Il consistait à mettre en oeuvre une maquette de simulation de traitement de surface pillotée par un automate Télémécanique TSX 47, lui même programmé via un ordinateur grâce au logiciel Cadepa (programmation grafcet). En fin d’année nous avions mis en oeuvre toutes les fonctions de la maquette grâce à des grafcet simples. |
Télémécanique fait partie du groupe Schneider
Electric qui est spécialisé dans les domaines de la
distribution électrique et des automatismes industriels |
Un des intérêt du projet était que le matériel nous était fourni sans documentation. Il nous a donc fallu, de manière autonome, comprendre le fonctionnement de la maquette et de l’automate. Pour celà, nous avons d’une part utilisé de la documentation Télémécanique, d’autre part démonté la maquette et établi son fonctionnement par l’observation des circuits électriques.
Composition de l’automate
Fonctionnement et capacités de la maquette : Les mouvements - Les actionneurs - Les afficheurs - Les capteurs - Les boutons |
|
Les afficheurs
Comme les moteurs, les afficheurs
fonctionnent sous l’ordre d’un signal 24 V continu de l’automate. La maquette
dispose de deux éléments d’affichage : une lampe et un afficheur
7 segments. La lampe pouvait être utilisée par exemple comme voyant
défaut (déclenchement de l’arrêt d’urgence), ou encore pour
signaler un arrêt temporisé. De même, en fonction du grafcet,
l’afficheur sept segments pouvait avoir diverses utilisations, comme par exemple
indicateur de position des chariots, compte à rebour, etc.
L’affichage
de l’afficheur sept segment était commandé par quatre fils constituant
un signal 4 bits standard correspondant aux chiffres à afficher (0001
pour afficher un 1, 0010 pour afficher un 2, etc.).
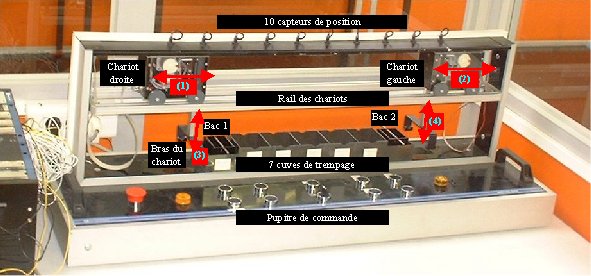
Les capteurs
La maquette dispose de différents
capteurs à induction qui renvoient un signal 24V à
l’automate lorsque du métal se situe devant eux.
Ainsi les dix capteurs
situé sur la plaque couvrant le rail et les chariots permettent de savoir
en face de quels cuves se situent les chariots. Dans chaque chariot deux capteurs
permettent de savoir si le bras est en position haute ou basse. Enfin, le chariot
de gauche dispose de deux capteurs ayant un rôle de sécurité
: il détecte l’approche du deuxième chariot et se déclenche
grâce à une barre de métal dépassant d’environ dix
centimètres du chariot de droite.
Les boutons
De la même manière
que les capteurs, les boutons renvoient lorqu’ils sont actionnés un signal
à l’automate, mais, bien entendu, c’est l’utilisateur qui les actionne.
Les différents boutons servent à commander le déplacement
des chariots ou encore à lancer un cycle de traitement determiné.
Le bouton d’arrêt d’urgence, en plus d’envoyer un signal à l’automate
lorqu’il est enfoncé, est associé à un système de
sécurité interne à la maquette, qui permet de stopper les
mouvements sans que l’automate n’en donne nécessairement l’ordre.
Enfin,
la maquette dispose d’un bouton particulier : une roue codeuse. L’utilisateur
peut positionner cette roue sur un des 10 chiffres dont elle dispose, et en
fonction du chiffre sélectionné, un signal codé sur 4 bits
(tout comme est codé l’affichage de l’afficheur 7 segments) sera envoyé
à l’automate.
|
|
C’est ce logiciel qui nous a permis de programmer l’automate. Cette programmation se fait par l’intermédiaire d’un grafcet qui est ensuite traduit, grâce à un module post-processeur, dans le langage de la machine. L’utilisateur n’a donc qu’à écrire son grafcet avec l’éditeur de Cadepa et à définir à quel connecteur d’entrée ou de sortie de l’automate correspond chaque variable utilisée.
Dans le cadre du projet, nous avons conçu plusieurs grafcet mettant en oeuvre différents types de cycle de traitement en coordonnant de manière variée les mouvements des chariots. Nous avons également conçu un grafcet général regroupant l’ensemble des différents grafcet, pour que l’utilisateur puisse sélectionner n’importe quel cycle prédéfini sans avoir à recharger un programme dans l’automate. Cependant, nous n’avons pu exploiter que les plus petits de nos grafcet, faute de mémoire (nous ne disposions que de 8 ko de RAM dans l’automate) et faute de moyens pour acquérir une nouvelle carte mémoire (plusieurs milliers de francs la carte de 32 ko !).

|
Ce type d’automate est particulièrement intéressant car il est en fait constitué d’un bac (nous avons utilisé un modèle RKS 8) pouvant accueillir différents types de modules d’entrée, de sortie et de communication, et bien entendu un module central : le processeur. Le processeur, un TSX 47, est la partie centrale de l’ensemble. Il permet de stocker les programmes (grâce à une carte de RAM), et surtout de les éxecuter en ordonnant les différents signaux de sortie (qui vont vers les moteurs et afficheurs) en fonction des signaux d’entrée (qui proviennent des capteurs et des boutons). |
|
Les modules d’entrée
|
Sur ce bac nous avons monté deux modules d’entrée TSX DET 16 12 disposant chacun de 16 entrées isolées prévues pour recevoir des signaux 24 V. Ces deux modules permettent d’accueillir les 31 cables de sortie de l’automate qui correspondent aux informations suivantes : 4 capteurs de position des bras, 10 capteurs de position des chariots, 1 capeur d’approche, 9 boutons poussoirs, 2 entrées correspondant à l’état d’un tri-sélécteur, 1 bouton d’arrêt d’urgence et 4 bits codant pour la roue codeuse. |
|
Le module de sortie
|
Un seul module de sortie était nécessaire
à notre installation : il s’agissait d’un TSX DST 16 82. Ce module
dispose de 16 connecteurs de sortie, dont 14 son utilisés et envoient
un signal aux différentes entrées de l’automate : 4 bits pour
l’afficheur sept segments, 8 commandes pour l’actionnement des moteurs, une
commande d’allumage de la lampe et une commande permettant d’actionner un buzzer. |
|
L’alimentation électrique
|
L’automate est alimenté par un module d’alimentation SUP 40, grâce au 220 V alternatif du secteur. Par contre le module de sortie, ainsi que différents éléments de la maquette comme les capteurs à induction ou les cartes relais pilotant les moteurs doivent être alimentés en 24 V continu. Pour celà, un générateur de courant continu indépendant de la maquette est utilisé. |
|
Revenir au titre